SKU: w9282
Функции 32-разрядного контроллера полета Pixhawk PX4 Autopilot PIX 2.4.8: Pixhawk 2.4.8 поддерживает последнюю официальную прошивку ardupilot и прошивку PX4. 1. Продвинутые 32-разрядные высокопроизводительные процессоры ARM CortexM4 (2 МБ флэш-памяти), могут запускать операционную систему NuttX RTOS в режиме реального времени; 2. 14 выходов PWM / servo; 3. Интерфейс шины (UART, I2C, SPI, CAN); 4. При сбое встроенного резервного питания и резервного контроллера основной контроллер переходит к резервному управлению безопасно; 5. Обеспечить автоматический и ручной режимы; 6. Обеспечить резервный ввод питания и аварийный переход; 7. Разноцветные светодиодные индикаторы; 8. Обеспечить интерфейс многотонального звукового сигнала; 9. Запись полетных данных на Micro SD; Технические характеристики: Интерфейс 1.5 совместимых с высоким напряжением UART 1, 2 с аппаратным управлением потоком 2. 2 CAN 3. Вход, совместимый со спутниковым приемником Spektrum DSM / DSM2 / DSM-X. 4. Входы и выходы, совместимые с Futaba SBUS 5. Вход сигнала PPM 6. RSSI (PWM или напряжение) Вход 7. I2C 8. Вход SPI 9.3.3 и 6.6VADC 10. Внешний интерфейс MICRO USB
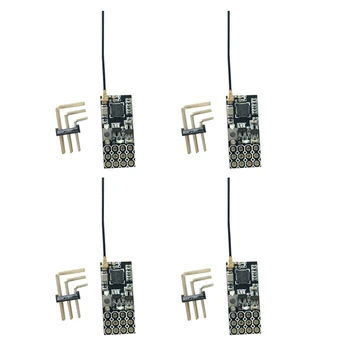
WIFI версии V1.0 и V2.0 используют 8-битный процессор, поддерживают только UDP WIFI версии V3.0 используют 32-битный процессор, поддерживают TCP и UDP.WIFI версии V2.0 и V3.0 используют внешнюю антенну (5 ДБ)
Обзор GPS M10
В GPS M10 используется ГНСС с несколькими группировками, работающая на базе u-blox серии M10, одновременного приемника GNSS, который может принимать и отслеживать несколько систем GNSS.Благодаря многополосной интерфейсной архитектуре RF все четыре основных созвездия GNSS, GPS, Galileo, ГЛОНАСС и BeiDou, могут приниматься одновременно.
Он также поставляется с компасом IST8310.Этот модуль поставляется со скоростью передачи данных 115200 бод, 5 Гц.
Патч-антенна с высоким коэффициентом усиления 25 x 25 мм обеспечивает отличную производительность, а всенаправленная диаграмма направленности антенны повышает гибкость установки устройства.Она оснащена активной схемой для керамической патч-антенны и перезаряжаемой резервной батареей для "теплого" запуска.
Требуется поддержка встроенного ПО для M10 GPS:
PX4 1.14, ArduPilot 4.3, INAV 5.0.0, Betaflight 4.3.0 или новее.
Спецификация
M10 GPS
M9N GPS
Приемник GNSS
Ublox M10
Ublox M9N
Количество одновременных GNSS
До 4 GNSS
До 4 GNSS
BeiDou
BeiDou
Galileo
Galileo
ГЛОНАСС
ГЛОНАСС
GPS
GPS
QZSS
QZSS
Полоса частот
GPS L1
GPS L1
Galileo E1
Galileo E1
ГЛОНАСС L1
ГЛОНАСС L1
BeiDou B1
BeiDou B1
SBAS L1
SBAS L1
QZSS L1
QZSS L1
Компас
IST8310
IST8310
Выходной протокол
UBX (U-blox)
UBX (U-blox)
NMEA
NMEA
Точность
2,0 м CEP
1,5 м CEP
Навигация. Частота обновления
До 25 Гц (одиночная GNSS),
До 25 Гц (4 одновременных GNSS)
До 10 Гц (4 одновременных GNSS)
Система расширения GNSS
EGNOS, GAGAN, MSAS и WAAS
EGNOS, GAGAN, MSAS и WAAS
QZSS: L1S
QZSS: L1S
Скорость передачи данных по умолчанию
115200
115200
Входное напряжение
4,7-5,2 В
4,7-5,2 В
Тип порта
CH-6P
CH-6P
Антенна
Керамическая патч-антенна 25 x 25 x 4 мм
керамическая патч-антенна 25 x 25 x 4 мм